Mechanical Dynamics/機械動力学
ロータダイナミクスの非線形解析と制振
回転機械(ロータ)は,ロケットのターボポンプやジェット機のエンジン,火力・水力・原子力の発電機のタービン(大きいものは50mもの長さです),自動車,工作機械,洗濯機や掃除機などの家電,パソコンのハードディスク,など,ほとんどすべての機械に備わっているものです.ロータでは,回転によりジャイロモーメントという運動と直交方向に作用する力が現れるため,通常の機械を扱うのとは違ったモデリングや現象の解析が必要となります.したがって,ロータのダイナミクスを解析するのは,非常に現実的な対象であり重要であるのと同時に,奥の深い分野でもあります.
最近は,マルチフィジックスといわれる,複数領域の横断的分野が盛んに研究されていますが,ロータダイナミクスでも,流体軸受で支持されたときの機構・流体連成解析,ビルトインモーターで駆動するときや磁気軸受で非接触に支持されたときの機構・電磁場連成解析が最近の研究対象領域となってきています.そして,これらを詳細に調べる際には,流体力や電磁力は距離の非線形関数となりますので,非線形解析が必須となります.
私たちの研究室では,これまで培ってきた非線形解析のノウハウを駆使し,これらのマルチフィジックスなロータダイナミクス解析の手法開発,現象の解析を推し進め,産業界のニーズに先駆けた成果を,社会に発信・提供していきます.
ダイナミクス理論に基づく状態モニタリング・診断
いちど運転を開始すると長期間運転をし続ける機械構造物が多くあります.その種の機械では一般に定期的に機械を止めて検査をしますが,この頻度が必要以上に多すぎるとコストが大きくなり,逆に頻度が低すぎると機械の故障・異常を初期に発見できず,事故が発生することになります.このような故障に伴う事故はときに多大な費用が発生したり生活基盤を支える電力供給や交通にまで影響して社会的な問題にもなります.このような背景から,この両者の間の最適な頻度・手法によるモニタリングと診断技術手法の開発が強く望まれています.
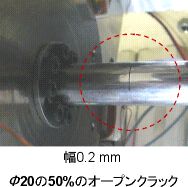

クラック検出,位置と深さの推定
私たちの研究室では,磁気軸受をアクチュエータとしたアクティブコンディションモニタリング法を提案しており,有限要素法を用いた回転機械の大規模次元モデルと併せた数値解析により,高精度な疲労亀裂の検出を実現してきています.さらには,亀裂の進展の度合いや位置・深さを推定する診断手法の開発を目指して研究を進めていきます.
振り子式動吸振器を用いたヘリコプターブレードの制振
ヘリコプタのブレードは,遠心力と重力の双方が動方向あるいは直交方向に作用する弾性体です.近年,ヘリコプタでは,そのブレードの振動が本体とそこに乗っている乗客へ与える不快感の低減が要求されています.とくに,救急用ヘリコプタの場合には,患者に与えられる振動の低減が必須項目です.非線形性を持っている場合(振り子など)は,線形化して解析すると,実際のものでは全く予想しないことが起きる可能性が有り,非線形解析を併用した制振法の開発が望まれます.
人間機械振動系のモデリング・解析と設計への応用

乗用車や電車などは人間が乗って運転する機械です.このような機械における,乗っている人間の快適性と機械の静粛性を同時により向上するために,人間のダイナミクスも含めた機械系のモデリングや解析を行っています.これまでに,人間の感性の動的システムのモデリングへの影響を実験により明らかにしてきました.これからは,座っている人の場合や横方向の外乱に対するモデル構築にも取り組むと共に,構築したモデルを用いた制振法の開発も行なっていきます.
マルチボディ理論を用いたロータダイナミクス解析
ムービー
最近機械力学で最も活発に研究されている分野の1つはマルチボディダイナミクスです.本研究室では,例えば船や飛行機のように基礎が大きく運動する場合など従来手法では調べることが難しいロータダイナミクスについてマルチボディ理論を用いたモデリング,解析手法,その特性の解明を行っていきます.
ターボポンプの高精度モデリングとダイナミクス解析
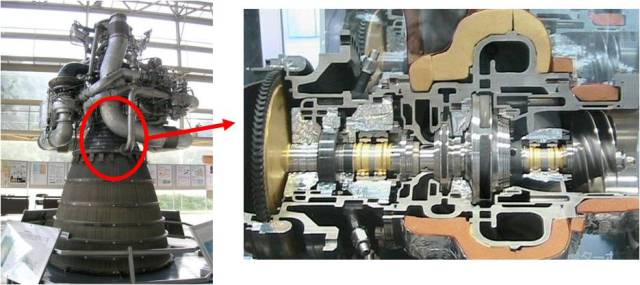
H2Aロケットは日本独自技術(純国産ロケット)で,左の写真はH2ロケットのLE-7メインエンジンです。 このロケットの中で唯一動く機械と言ってよい部品がターボポンプで,右の写真はその中のLE-7液酸ターボ ポンプ(OTP)です。 このターボポンプは,液体水素や液体酸素を毎秒数百リットル供給する,世界でも「最大級」のロケット用ポン プです.ロケットのターボポンプは構造と流体,熱(液体部は極低温,燃焼部に近い軸の部分は高温),接触が 複雑に絡み合うマルチフィジックス系であり,現在,その高精度のモデリングとダイナミクス解析が強く望まれ ています.このテーマの達成には機械航空工学科・電子機械工学コースで皆さんが学んできた内容全般が関連し ます.
ジャイロ効果を利用した運動器具の力学
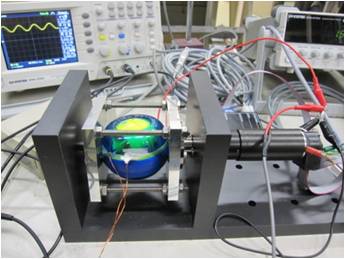
わずかな振動振幅から,大きな回転速度を発生させる「ダイナビー」もしくは「パワーボール」という遊具があります. ダイナビーは複雑な回転運動をするため,力学の解析がまだ十分になされていません. そこで本研究では従来より精緻なダイナビーのモデル化をすることで, シミュレーション,実験を通じダイナビーの力学を解析しています.
Electromagnetics/電磁力応用
能動型磁気軸受/受動型磁気軸受
回転する軸を電磁力を用いて非接触で支持することができる磁気軸受はかつては“夢の軸受”と呼ばれ,現在ではターボ分子ポンプや人工心臓(テルモのデュラハート(DuraHeart))などに採用されています.
さらに磁気軸受は,その“給油装置や冷却装置などが不要になる.慣性主軸周りで回転させることができる.モニタリング装置を兼ねることができる”など各種の長所が注目され,航空機エンジンの代替軸受としても期待されて研究が進められています.本研究室では,磁気軸受の電磁・構造連成非線形解析,受動型磁気軸受とボールバランサの併用による制振,能動磁気軸受を用いた振動制御とバランシングの同時実現,アクティブヘルスモニタリングの研究を進めています.

センサレス位置推定と磁気浮上
磁気浮上系は,電気回路,磁気回路,構造系の3つの部分から構成されています.これまでは,これらの物理量の間の関係についての理論ベースなモデリングと,そのモデルを用いた非線形解析手法を開発してきました.現在は,実験データにもとづいたより精緻な非線形モデリングを進めております.さらには,得られたモデルベースの磁気浮上系の位置や状態推定手法の開発とセンサレス磁気浮上,永久磁石を用いた省エネルギー磁気浮上系のモデリングと理論解析に取り組んでいきます.
電磁シャントダンピング
電磁アクチュエータは電流によって力を発生しますが,運動によって逆に起電力を発生しセンサ(発電機)としての機能ももちます.そのため,単一の電磁アクチュエータをセンサかつアクチュエータとして同時に利用して制振することが可能になります.また,原理的には電源が不要であるというメリットもあります.ここでは単一の電磁アクチュエータに外部電気回路を取り付けて制振する手法(シャントダンピング)について研究します.
Smart Materials/知能材料
イオン導電性高分子アクチュエータ(IPMC)のモデリング

IPMC(Ionic Polymer-Metal Composite)アクチュエータは,柔軟で低電圧で駆動でき,大きく変形するという特長をもち,小型ロボットの”人工筋肉”や柔軟なマイクロアクチュエータとして近年注目を集めています.その動作原理には電気化学,流体,弾性力学が関連すると考えられます.この動作原理の解明を目指し,実験とシミュレーション,解析を研究します.
IPMCアクチュエータのロボット応用

IPMC(Ionic Polymer-Metal Composite)アクチュエータのモデルベースト制御のためのモデリング,制御系設計,ロボティクス応用などを目指します.
圧電シャントダンピング
PZTなどの圧電材料は,電圧によって応力を発生し,また変形によって逆に電荷を発生しセンサとしての機能ももちます.そのため,単一の素子で構造物の制振に用いることが可能になります.また,原理的には電源が不要であるというメリットもあります. さらに圧電材料は機械構造物に埋め込むことができるというスマート構造としての利点もあります. そこで,単一の圧電素子に外部電気回路を取り付けて制振制御を行う,シャント制振と呼ばれる手法について研究します.