高木賢太郎
所属
- 2020年4月より豊橋技術科学大学に異動しました
-
教授
国立大学法人 豊橋技術科学大学
機械工学系
〒441-8580 愛知県豊橋市天伯町雲雀ケ丘1−1
E-mail: kentaro.takagi @ nagoya-u.jp
News
- イオン導電性高分子(IPMC)センサの物理シミュレーションとモデル低次元化
-
- K. Kondo, K. Takagi, Z. Zhu, K. Asaka,
Symbolic finite element discretization and model order reduction of a multiphysics model for IPMC sensors,
Smart Materials and Structures, 29(11), 115037, 2020 Oct.
[doi]
- 圧電・電磁シャントダンピングの動吸振器最適解(厳密なH∞/H2最適チューニング)
-
- T. Ikegame, K. Takagi, T. Inoue,
Exact Solutions to H infinity and H2 Optimizations of Passive Resonant Shunt Circuit for Electromagnetic or Piezoelectric Shunt Damper,
ASME Journal of Vibration and Acoustics, 141(3), 031015, 2019 Mar.
[doi]
- 電磁トランスデューサ(ボイスコイルモータなど)の分布定数系としてのモデル化と,センサレスパラメータ推定
-
- T. Ikegame, K. Takagi, T. Inoue, I. Jikuya,
Sensorless parameter estimation of electromagnetic transducer considering eddy currents,
Mechatronics, vol.45, pp.130-142, 2017 Aug.
[doi]
[pdf ]
- IPMCの変形を簡易に大きくする方法について(銅イオンの影響について)
-
- K. Takagi, N. Tomita, K. Asaka ,
A Simple Method for Obtaining Large Deformation of IPMC Actuators Utilizing Copper Tape,
Advanced Robotics, vol.28, issue.7, pp.513-521, 2014 Jan.
[doi]
[pdf (free up to 50)]
研究内容
圧電材料(Piezoelectric materials)や電場応答性高分子(Electroactive polymer, Electromechanically-active polymer, EAP),熱応答性高分子繊維などのスマート材料(Smart materials)を中心としたアクチュエータとセンサに関する基礎と応用について研究しています.
スマート材料応用
圧電材料や電場応答性高分子(Electroactive polymer, EAP)などのスマート材料(Smart materials)の応用について研究しています.我々のグループでは,水中で駆動できるIPMC(Ionic Polymer-Metal Composite)アクチュエータのロボット応用,高速で応答する誘電エラストマーアクチュエータの応用,安価で簡易な釣り糸アクチュエータのロボット応用,圧電材料や電磁トランスデューサを用いたセンサレス振動制御などについて研究を進めています.
釣り糸人工筋肉のロボット応用
ねじってコイル状にしたナイロン糸に熱を加えると大きく収縮(10%-20%)することが近年発見され[Haines et al., Science, (2014)],人工筋肉としての利用が見込まれています.釣り糸などのナイロン糸は極めて安価で容易に入手でき,今後のアクチュエータ応用が期待されます.ロボットや支援装具への応用を目指し,我々のグループではその高性能化とモデリング,制御法などについて研究しています.なお,この研究テーマはNEDO次世代ロボット中核技術開発プロジェクト(H27-H28)に共同研究者の田原健二先生(九州大学)と共同で採択されました.[NEDOプレスリリース]
発表文献
IPMCアクチュエータのロボット応用
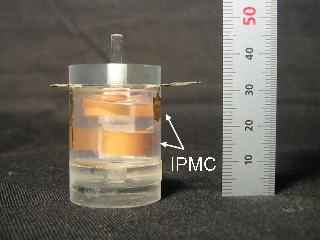
IPMC(Ionic Polymer-Metal Composite)は数Vの低電圧で駆動可能で,柔軟で大きく変形するという特長をもち,小型水中ロボットの"人工筋肉"やマイクロアクチュエータへの応用が期待されています.これまでに,有限回転モータ,ヘビ型ロボットの水中推進における力学の解析,エイ型ロボットの開発,四足歩行ロボットの開発などを行ってきました.
Key Words : Electroactive Polymer, Ionic Polymer-Metal Composite (IPMC),
Soft Actuator/Sensor, Electromechanical Transducer, Artificial Muscle, Soft Robot

- IPMCを用いた有限回転型アクチュエータ[Video(2.5MB)] [論文(WW-EAP News, SPIE2005, SI2004)]
- ぜんまいバネをヒントに,IPMC(Ionic Polymer-Metal Composite)の屈曲を有限角度の回転に変換する機構を提案した.2[V]を印加したところ,約10[deg]の回転角/約10[μN]のトルクを発生した.
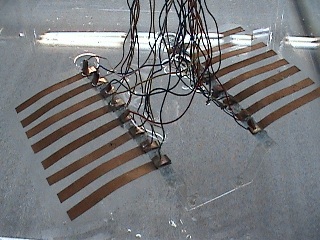
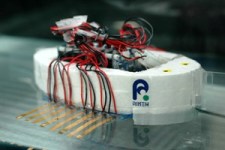
- エイ型水中ロボット[Video(3.9MB)] [論文 (WW-EAP News)]
- IPMCを用いたエイ型のロボットを開発した.ロボットのヒレはポリエチレン薄膜と16個のIPMCからできており,適切な電圧を加えることでヒレに進行波を作り前進・後退ができることを実験により確認した.
- 屈曲による水中推進原理の解明とその工学的応用 [論文(RSJ2005, SPIE2006, J.ISCIE)]
- 人工筋肉の数理モデルの応用先として,屈曲推進型水中ロボットのための制御器設計法の確立を目指して研究を行っている.ところで,屈曲推進型水中ロボットでは入力が一定振幅の進行波であるにも関わらず変形振幅が後方に向かって増大するという興味深い現象がみられる.この現象は生物にもみられ,その原理のモデル化と解析を試みている.
発表文献
誘電エラストマーのロボティクス・メカトロニクス応用
誘電エラストマーは高電圧で動作する高分子アクチュエータの一種であり,高速に応答することから小型柔軟なアクチュエータとして期待されています.
スマート材料のモデル化
スマート材料の応用において,シミュレーションや設計のためには,数理モデルが重要となります.物理原理の解明はもちろんのこと,我々のグループではとくに,制御工学の観点から使いやすい数理モデルや,物理パラメータの推定などについて研究を行っています.
発表文献
イオン導電性高分子アクチュエータのモデリング
IPMCやBucky gelなどのイオン導電性高分子アクチュエータの動作原理は十分に解明されておらず,その動作原理の理解に向けて電気化学,流体力学,弾性力学,高分子物理などを用いたモデル化が必要であると考えられます.我々のグループでは,動作原理の解明とともに,とくに,モデルベースト制御やシミュレーションなどに使いやすい数理モデルについて研究しています.また,実験とシミュレーションの両面から検証を行います.

- IPMCの電気インピーダンスのモデル化 [SI2005, CAM3]
- IPMCはイオン導電性高分子を用いたアクチュエータであり,その電気機械変換特性などまだ十分にモデル化されていない.アクチュエータの効率的駆動を目指して,電気的特性のモデル化を試みている.インピーダンス計測の結果,周波数特性から分布定数系に特徴的な応答をもつことを明らかにし,分布回路によるモデリングを考えている.
発表文献
圧電/電磁トランスデューサのセンサレスパラメータ推定
圧電トランスデューサや電磁トランスデューサは,センサとしてもアクチュエータとしても利用でき,外部センサを用いることなく電気的な計測だけでパラメータ推定を行うことが可能であることを見出しました.我々のグループでは,トランスデューサのパラメータをインピーダンス計測だけから推定する手法について研究しています.
発表文献
振動制御
Key Words : Piezoelectric Material, PZT, PVDF, Shunt Damping, Passive Vibration Control, Smart Structure
圧電シャント制振
ピエゾセラミクスに代表される圧電材料を用いて構造物の制振を行う圧電シャント制振と呼ばれるセンサレス振動制御法があります.この手法は単一の圧電素子に外部電気回路(シャント回路)を取り付けるだけで制振が可能であり,さらに原理的には電源が不要であるというメリットがあります.我々のグループではとくに,制御工学の観点に基づいたモデリングと制御系設計を行い,ソフトウェア(制御手法)の新規提案と,ハードウェア(仮想インピーダンス/アドミタンス回路)の開発について研究しています.
発表文献
- ロバスト性に着目した回路素子値設計 [機論2003]
- スイッチングシャントダンピング [機論2005]
- ディジタル仮想インピーダンスによる圧電シャント制振
[JSME2011]
- ディジタル仮想アドミタンスによる圧電シャント制振 [機論2013]
- セルフチューニング負性キャパシタによる適応圧電シャント制振 [機論2014]
- 寄生抵抗の存在によって負性キャパシタが不安定になることの解明 [機論2015]
電磁シャント制振
ボイスコイルモータなどの電磁トランスデューサは,アクチュエータ(電流によって力を発生)としても発電機(運動によって逆起電力を発生)としても利用でき,この特長を活かしてセンサレス振動制御手法の開発を行っています.この手法は電磁シャント制振と呼ばれ,圧電シャント制振と同様,単一の電磁アクチュエータに外部電気回路(シャント回路)を取り付けるだけで制振が可能な方法です.これまでに,ボイスコイルモータにディジタル制御が可能な仮想インピーダンス回路を取り付けて制御を行い,負の抵抗値をもつシャント回路によって大きな制振効果を得られることを実証しました.
発表文献
過去の研究テーマ
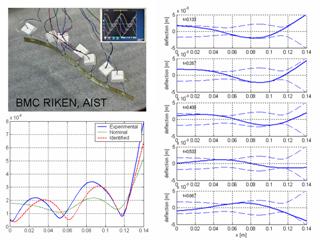
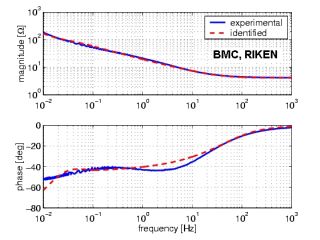
生体筋の計測とモデル化
システム同定手法を用いて骨格筋の筋音図データから状態空間モデルを得る方法に関する研究(@理研BMC)
独立成分分析(Independent component analysis)を用いたモード解析
振動モード形状の推定を用いた構造物の健全性診断に関する研究
振動モード空間フィルタ
分割ピエゾフィルムを用いたモードフィルタ(Modal filter)
略歴,研究業績
関連リンク
Last updated: 2020/12/25